
LAVOTCHKIN-LA-17
Desarrollo de la posguerra de combate reactivo aviación causó la necesidad de crear nuevas herramientas que proporcionen una lucha efectiva contra objetivos de alta velocidad que vuelan a diferentes alturas. A finales de los años cuarenta, el trabajo experimental ya estaba en marcha, pero ya había mostrado su promesa sobre los primeros misiles guiados aire-aire (UR) domésticos en el NII-1 MAP, NII-2 MAP, en la planta No. 293 (misil SNARS-250), Además, los especialistas del NII-88 en el campo de entrenamiento de Kapustin Yar comenzaron las pruebas de vuelo de copias domésticas de misiles antiaéreos alemanes. A este respecto, era necesario un avión objetivo, que pudiera proporcionar pruebas y entrenamiento para disparar misiles guiados antiaéreos y sistemas de artillería, así como portaaviones de combate.
Anteriormente, se utilizaba para estos fines objetivos remolcados atados, como conos y paneles. Sin embargo, con velocidades crecientes, el uso de tales objetivos hechos de lienzo, se volvió casi imposible. Además, el cono era invisible para los localizadores en desarrollo. Intentaron resolver este problema creando objetivos remolcados, que prácticamente imitaban a las aeronaves tripuladas en tamaño y diseño. Pero no pudieron cumplir con los nuevos requisitos, incluso para garantizar la seguridad de la aeronave: el remolcador. Si, al atacar a un caza con armamento de cañón, el retraso del objetivo a cientos de metros de la aerolínea proporcionaba suficientes garantías de seguridad para el disparo, el misil guiado podría comportarse de manera muy independiente y, en lugar de un objetivo, ser conocido por el avión de remolque. El uso de cables más largos era imposible.
El siguiente paso para tratar de resolver este problema fue un intento de usar como objetivos para las pruebas de misiles. armas Aviones ordinarios, equipados con el equipo adecuado para volar en modo no tripulado. La principal ventaja de estos objetivos fue la proximidad a los objetivos reales en términos de susceptibilidad y características de la señal. Al principio, se utilizaron aviones Tu-4 prácticamente sin terminar. Los pilotos despegaron del aeródromo, llevaron al bombardero a un rumbo predeterminado, encendieron el piloto automático y luego descendieron en paracaídas. Si el Tu-4 no pudiera ser derribado con un cohete, los combatientes que proporcionan las pruebas lo terminarían. Era más difícil usar IL-28 más moderno como objetivos. El rescate, incluso si se llevó a cabo de acuerdo con el esquema estándar, sin complicaciones, a menudo tuvo un efecto perjudicial en la salud del piloto. Tuve que desarrollar equipos para el Il-28, proporcionando despegues y vuelos no tripulados a lo largo de una ruta determinada. Otra desventaja de tales objetivos, reparada de aviones tripulados, fue el alto costo. Como vemos, a comienzos de la década de los cincuenta era necesario crear un objetivo no tripulado bastante barato, en términos de características tácticas de vuelo que se aproximen al avión de combate de esa época.
En esos años en la Unión Soviética, naturalmente, todavía no había una organización especializada que tratara el tema de los aviones objetivo. Y, luego, dada la autoridad y nivel de diseño de S.A. Lavochkin, comandante en jefe del mariscal de la Fuerza Aérea K.A. Vershinin sugirió que participe en la creación de un objetivo para probar y disparar misiles guiados aire-aire K-5 y misiles guiados antiaéreos avanzados. El trabajo en el avión objetivo se inició en el año 1950 de acuerdo con una resolución gubernamental de 10 de junio 1950, No. 2474-974.
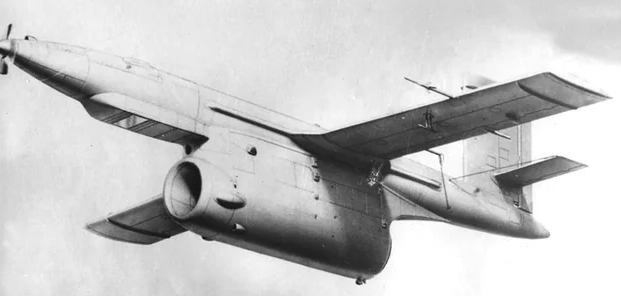
El trabajo sobre la creación del avión objetivo, que recibió el nombre interno "producto 201", en la planta piloto No. 301 fue encabezado por I.A. Merkulov, luego fue reemplazado por A.G. Chesnokov. Lo principal en la elección de soluciones técnicas para el nuevo automóvil fue el deseo de reducir extremadamente el costo del producto. El avión fue hecho al estilo del avión proyectil alemán V-1. Los contornos tenían una configuración extremadamente simple. El ala tenía forma rectangular y se reclutó de un perfil CP-11-12.
La perfección ponderada del diseño sacrificó la fabricabilidad. En particular, tomó la mayor parte de la longitud del fuselaje, llevando el tanque de combustible hecho de acero, que para entonces dominaba la soldadura hermética mejor que una operación similar sobre aleaciones de aluminio. La elección del motor ramjet (ramjet) RD-800, también está determinada por la simplicidad y el bajo precio. El desarrollo del motor condujo a OKB-670 MM. Bondaryuk, que ya ha completado el desarrollo de un motor de dimensión cercana, para el misil anti-barco del complejo costero Shtrom. Para reducir el costo, en lugar de bombear gasolina forzada utilizada, se realiza mediante aire comprimido colocado en cilindros esféricos. El motor fue suspendido debajo del fuselaje cerca de la sección del ala central.
El piloto automático AP-53 fue desarrollado por la organización principal de Minaviaprom sobre este tema: el diseñador jefe de OKB-112, B.Е. Antipov. Utilizaba máquinas de dirección neumática, que se accionaban con aire comprimido de los cilindros. No se encontró inmediatamente una solución adecuada, cómo simplificar y abaratar el piloto automático. En 1952, el AP-53 se cambió a AP-60, y un año más tarde, a AP-61.
Además del piloto automático, el objetivo estaba equipado con un equipo de comando de radio, creado por un equipo de N.I. Belova, en una de las principales organizaciones de la época para el desarrollo de sistemas de control para misiles y otros vehículos aéreos no tripulados - SRI-648. Las antenas cableadas de este equipo ataron la parte media del fuselaje con los extremos del estabilizador. Como fuente de electricidad, se utilizó un generador que giraba con una pequeña hélice de dos palas, una "turbina eólica" instalada en la punta del fuselaje.
En una etapa temprana de desarrollo para su reutilización, se planeó equipar al objetivo con un sistema reactivo con paracaídas y amortiguadores especiales para un aterrizaje suave. Sin embargo, resultaron ser bastante pesados, demasiado complicados de resolver, ocuparon mucho espacio dentro del objetivo. Sí, y el aterrizaje del objetivo en sí mismo fue el resultado de no ser esencialmente estándar y como se esperaba en una situación poco frecuente. Se llevó a cabo solo en el caso de que el cohete o la aeronave no lo derribaran.
Por lo tanto, como esquema de rescate, el objetivo realizó un aterrizaje horizontal en el bloque del motor, que se usó como esquí de aterrizaje. En contraste con el turborreactor, el motor de flujo directo no estaba densamente saturado con elementos estructurales internos, y su cuerpo se deformaba libremente, suavizando el golpe.
En el concepto de máxima simplicidad, plasmado con éxito en el "producto 201", había un vínculo dudoso: un motor ramjet. Funcionó solo con una velocidad suficiente del flujo de entrada y, en principio, no pudo proporcionar un despegue independiente de la aeronave. Por lo tanto, el avión objetivo solo podría ser lanzado desde una compañía aérea. Inicialmente, se suponía que debía usar Tu-2, que todavía está disponible en la Fuerza Aérea en gran número, pero que ya es absolutamente poco prometedor como vehículos de combate. Pero el objetivo con un motor de gran empresa no muy grande y una quilla alta no cabía debajo del avión. La colocación del portador sobre el fuselaje, modelada en los "Mistels" alemanes de los "Junkers-88" con el caza montado sobre él, se consideró demasiado arriesgada.
Al final de 1951, a sugerencia de LII, comenzaron a utilizar el Tu-4 colocando el objetivo debajo del ala, fuera de la góndola del motor, y desde el año siguiente esta variante fue aceptada como la principal. En el proceso de desarrollo, aumentaron la dimensión del motor, que recibió la designación adecuada - РД-900. Con un peso neto de 320 kg a la velocidad de vuelo 865 km / h, desarrolló un empuje de 625 kgf y 425 kgf a altitudes 5 y 8 km, respectivamente.
Para los lanzamientos del objetivo, se preparó el Tu-4, desmantelando bombas y armas pequeñas. En el relleno sanitario, Vladimirovka desplegó el equipo de radio MRV-2M, que incluía dos estaciones. El objetivo fue rastreado con el uso del radar circular P-30, y la estación de artillería SON-4 también fue posible para este propósito.
Las pruebas de vuelo comenzaron en 13 en mayo en 1953, y se llevaron a cabo primero con objetivos programados, sin utilizar el control de radio. Debido al marcado empuje insuficiente de un motor ramjet a bajas velocidades, después del lanzamiento, antes de reiniciar el avión objetivo a una altura de aproximadamente 8 km, y a una velocidad bastante decente para el Tu-4, aproximadamente 500 km / h, el ramjet no podía volar sin frenar y acelerar . Por lo tanto, después de abandonar el portador, el objetivo se sumergió, lo que duró aproximadamente un minuto y medio. Después de la aceleración a la velocidad 845 - 905 km / h, el objetivo ya era capaz de maniobrar vigorosamente e incluso ganar altitud. En uno de los vuelos logró escalar casi 10 km. Las pruebas han demostrado la necesidad de realizar una serie de mejoras en el diseño y, en junio, por orden del Consejo de Ministros, los lanzamientos se detuvieron temporalmente.
Las pruebas estatales se llevaron a cabo en Vladimirovka de junio a octubre 1954. Tu-4 realizó vuelos 19, de los cuales 13, con el restablecimiento de objetivos, incluido un par de lanzamiento. En todos los vuelos de seguridad, el objetivo fue acompañado por un MiG-15. Durante los vuelos, la velocidad constante se mantuvo de 575 a 905 km / h, la altitud varió de 2,8 a 9,75 km. El tiempo de operación de la central eléctrica fue de hasta 8,5 mín.
Durante las pruebas se reveló la posibilidad de aumentar la duración del vuelo en 1,5 min. Debido a la aceleración del motor, pero para esto fue necesario modificar el sistema de control de radio, para la transferencia del comando apropiado a la placa. Después de que el motor dejó de funcionar, el objetivo continuó ganando altitud durante el 80-100 desde entonces, perdiendo rápidamente el impulso. Luego comenzó a disminuir a una velocidad de 300 - 340 km / h, perdiendo cada segundo 8 - 10 m en altura.
Antes de aterrizar, el objetivo fue lanzado a grandes ángulos de ataque por comandos desde el suelo, con el resultado de que la velocidad vertical se redujo a la mitad. Como resultado, el daño a la estructura durante el aterrizaje se limitó al motor, que, en principio, simplemente fue reemplazado por uno nuevo. Durante las pruebas, se reveló una pequeña visibilidad de radar del objetivo: fue detectada por el radar a bordo RP-1 y los interceptores "Emerald-2" en distancias 2-3 km con soporte de rastreo a una distancia de 1,1-2,5 km. Esto impidió la prueba de misiles guiados K-5, ya que el alcance mínimo real de lanzamiento de estos productos en ese momento excedía 3 km.
En conclusión, se recomendó a la Comisión Estatal llevar a cabo ensayos militares de la meta el año que viene y para esto convierta cinco Tu-4 más. Teniendo en cuenta el primer vehículo que participó en las pruebas estatales, el número total de bombarderos convertidos en portaaviones en la planta de aviones de Kazan No. XXUMX alcanzó seis y no aumentó en el futuro.
En general, el objetivo cumplió con los requisitos para ello, fue aceptado para suministro por el Ministerio de Defensa y recibió la designación La 17. Es curioso que bajo este índice en la literatura extranjera de mediados de los años cincuenta apareciera el luchador La-15: la máquina, a diferencia del MiG-15, no era masiva y no fue identificada de manera correcta por los analistas de los países de la OTAN. El secreto en aquellos tiempos en la URSS estaba en el nivel más alto.
Ya en 1952, comenzaron a lanzar la producción en masa de La-17 en la planta de aviones de Orenburg No. XXUMX. Desde 47, se produjeron en la fábrica de aeronaves No. XXUMX en la ciudad de Gorky, donde se construyeron casi doscientos y medio objetivos. La-1956 se utilizó con éxito para el entrenamiento de combate del personal y el desarrollo de nuevas armas, pero tenía un inconveniente importante: la necesidad de utilizar los medios Tu-21. Este último ganó la altura del lanzamiento en dos horas, durante las cuales las circunstancias podrían interferir con la conducción del disparo. Al mismo tiempo, el Tu-17 quemó mucha gasolina, y el número de portadores reparables impidió los lanzamientos de grupo para imitar las redadas en masa, y limitó las áreas de posible disparo con el uso de La-4.
A mediados de los años cincuenta por iniciativa de A.N. Chesnokov comenzó el desarrollo de la modificación La-17 con un lanzamiento en la superficie, el "producto 203", más tarde denominado La-17M. La tarea tenía dos soluciones alternativas. El primero es equipar al La-17 con un acelerador de arranque, acelerándolo a una velocidad de más de 700 km / h. Otra solución es abandonar el uso de un motor ramjet cambiando a un turborreactor. En este último caso, fue necesario acelerar el objetivo a una velocidad suficiente para un vuelo estable y controlado, es decir, en 2-3 veces más pequeño de lo que era necesario para un ramjet.
Al mismo tiempo, la solución de los problemas de la dinámica del inicio del objetivo y la separación de los aceleradores, cuya masa resultó ser varias veces menor, fue mucho más simple. Además, el uso de TRDs abrió el camino a un aumento significativo en el desempeño táctico del objetivo, en particular, el techo, que no correspondía al nivel de aviación de ese tiempo.
Después de realizar los estudios de diseño, eligieron la ruta de transición al uso del TRD RD-9BK, una versión de corta duración del motor RD-9BF utilizado en el MiG-19. Debido a la ejecución no forzada, el empuje máximo se redujo de 3300 a 1950 kgf, que aún excedió muchas veces el empuje del RD-900 de flujo directo.
El desarrollo del "producto 203" fue dado por el decreto del año de 1958 del mes de julio. En el mismo año, se lanzó un diseño preliminar y, al año siguiente, comenzó la producción de objetivos 15 para vuelo y uno para pruebas estáticas.
Lanzador móvil creado sobre la base de los carros de ruedas serie antiaérea arma KS-19. Su remolque se llevó a cabo en el carro YAZ-214 (KRAZ-214).
La-17М fue lanzado utilizando los aceleradores de combustible sólido PRD-98, desarrollados en la oficina de diseño de la planta de Moscú No. XXUMX. Cada acelerador estaba equipado con una carga de combustible sólido de masa 81 kg, desarrollado empuje a 140 tf. Las horas variaron de 10,6 a 1,6 con. El impulso total de empuje de dos aceleradores PRD-3,1 - 98 kgf aseguró la aceleración del objetivo a una velocidad superior a 26000 km / h.
En el caso del acelerador en las partes de la nariz y la cola en un plano que no coincide con su eje longitudinal, se instaló en un par de superficies triangulares. Estas superficies crearon fuerzas aerodinámicas que contribuyen a la eliminación del cuerpo objetivo del acelerador al finalizar el trabajo. Peso de despegue aumentado a 3065 kg (2472 kg sin aceleradores). El tiempo de funcionamiento del motor aumentó a 35-39 mín., Lo que hizo posible aumentar el rango a 490 km. Debido al uso de un motor muchas veces más potente, el techo aumentó a 16 km. Pero en ausencia de regulación del empuje del motor, el objetivo a bajas altitudes excedió los límites de la cabeza de velocidad permitida, por lo tanto, la altura mínima de la aplicación objetivo fue 3000 m. A principios de los años sesenta, como resultado de la proliferación de armas de misiles antiaéreos, había una tendencia para la aviación a baja altitud y un límite inferior. Las aplicaciones de La-17M ya no cumplían con los requisitos de los tiempos. Para simular varios objetivos aéreos con una superficie de dispersión efectiva de 0,6 a 25 sq. m. La-17M estaba equipado con lentes Luneberg o reflectores de esquina apropiados, lo que aumenta la visibilidad del objetivo del radar. Sin embargo, en el rango de longitud de onda del radar alrededor de 3 cm, la visibilidad del radar del La-17M permaneció insuficiente. La-17M se lanzó a la producción en la fábrica de aviones en Orenburg, donde duró hasta el año 1964.
En noviembre, el 1961 del año ordenó la creación de una nueva modificación de destino, más tarde llamada La-17MM, con un rango de alturas de aplicación desde 500 m hasta 18 km, con una superficie de dispersión efectiva en el rango de 3-cm correspondiente a Tu-16. Il-28 y el misil de crucero FKR-1. Los principales cambios en el diseño del La-17MM se relacionaron con la sustitución del motor con un RD-9BKR con acelerador para limitar la velocidad durante el vuelo a baja altitud, instalando un reflector con un diámetro de 0,3 m en el fuselaje trasero y equipando con los transpondedores para determinar con mayor precisión las coordenadas del objetivo con P-XNUM y los sistemas Kama. Para mantener el objetivo en una ruta determinada con tolerancias con mayor duración de vuelo, el piloto automático AP-30 se reemplazó con AP-73 con una unidad integradora insertada en el canal de rumbo.
De acuerdo con los resultados de las pruebas de vuelo conjuntas realizadas de 1963 de octubre a diciembre, el rango de alturas de aplicación de La-17MM fue igual a 0,58-18,1 km, y la duración del vuelo, desde los minutos de 32 a la altura mínima hasta los minutos de 97 cuando se vuela sobre el techo. En altitudes elevadas, la velocidad alcanzó 875 km / h, durante el aterrizaje: 270-302 km / h con el componente vertical 5-6 m / s. La-17MM fue la última modificación del objetivo, que fue desarrollada por OKB-301, después de la muerte de S.A. Lavochkin
Como resultado de la transición de la antigua Oficina de Diseño de Lavochkin a la subordinación de V.N. Chelomeyu, como una sucursal número 3 OKB-52, y luego de recuperar la independencia de Khimki Design Bureau, concentró a sus especialistas en el desarrollo de naves no tripuladas, la mejora adicional de los objetivos de la familia La-17 se llevó a cabo por Kazan Sports Design Bureau, ahora llamada Falcon Design Bureau, bajo la dirección de A.I. Osokina.
A principios de los años sesenta, los motores del tipo RD-9 en aviones tripulados fueron reemplazados por TRD de la familia P-11. Mantener la producción de RD-9K en Ufa, especialmente para objetivos, no fue rentable. El RD-9FC equipado con una cámara de poscombustión solo se usó en misiles de aviones de la familia K-10, pero estos productos gradualmente dieron paso a misiles de crucero más avanzados. En 1985, el RD-9BKR finalmente se suspendió. Por lo tanto, desarrollamos otra modificación La-17K, que fue producida en Orenburg por el software Strela de 1978 a 1993.

La altura de aplicación mínima de La-17K disminuyó a 200 m, el valor máximo de la superficie de dispersión efectiva se redujo a 40 sq. La duración del vuelo alcanzó una hora, el radio de giro fue 6,8-7,6 km con el rollo 40 ° y 9,7-10,8 km con el rollo 20 °. La masa inicial del objetivo es 3,1 toneladas, incluidas 0,58 toneladas de combustible y 11 litros de aceite.
Los objetivos de la familia La 17 se utilizaron ampliamente para proporcionar entrenamiento de combate y probar nuevas armas en nuestro país y en las Fuerzas Aliadas. La documentación sobre la producción de La-17 se transfirió una vez a China. En este país, sobre la base de la modificación original con un motor ramjet y air start, los diseñadores chinos desarrollaron un análogo de La-17M, un objetivo CK-1 con un motor basado en Wopen-6, una versión con licencia del RD-9B, producido para F-6, un análogo chino de MiG-XNUM . Target SC-19 se adoptó en el año 1, es decir, con un retraso de seis años en comparación con el La-1967M. En 17, China desarrolló una versión de CK-1977А, que tiene contenedores laterales con equipo adicional. En 1, estos contenedores fueron reemplazados por tanques de combustible adicionales sin descarga. Nueva modificación recibió la designación CK-1982В. La última versión del objetivo СY-1С (“Chang Kong 1C” - “Blue Sky”) completó con éxito las pruebas de vuelo en noviembre 1 del año y se transfirió a la producción en masa.
Con la finalización del desarrollo del objetivo La-17, surgió una propuesta completamente predecible para crear un avión de reconocimiento no tripulado basado en él, capaz de operar en áreas particularmente peligrosas para aviones tripulados, ya sea según el grado de protección por medio de la defensa aérea o por el nivel de contaminación radiactiva. A finales de los años cincuenta, no se concibió una posible guerra sin armas nucleares, y durante las pruebas fue necesario asegurar la medición de la radiación y el muestreo de aire.
De acuerdo con un decreto gubernamental de junio 1956, se le dio instrucciones a OKB-301 para crear, sobre la base de La-17, un "producto 210-FR" de reconocimiento equipado con una cámara BAF40Р en una instalación mecedora para compensar el movimiento de la Tierra durante el vuelo. Los reflectores de esquina, las puntas de las alas de radio transparente y las lentes Luneberg se eliminaron mediante la instalación de puntas de metal. Al igual que el objetivo, el avión de reconocimiento tuvo que ser lanzado desde un avión de transporte, mientras que el rango de vuelo a una altitud de 7 km superó a 170 km.
En febrero, el 1958 del año también fue asignado para desarrollar el vehículo de reconocimiento no tripulado La-4B lanzado desde el Tu-17, con un rango de vuelo aumentado, lo que aseguró un radio de aplicación de hasta 100 km. Vale la pena señalar que para este momento el La-17 original y el concepto mismo del lanzamiento aéreo están obsoletos. Desde 1959, el trabajo de modificación de reconocimiento, que recibió el nombre de La-17BR, ya se realizó sobre la base de La-17М a partir del suelo con el TRD RD-9BK.
Bajo la dirección de, quien reemplazó a M. M. Lavochkin. Pashinin, sobre la base de La-17M, comenzó el desarrollo del "producto 204", destinado al reconocimiento de foto y radiación a una distancia de hasta 250 km. El explorador estaba equipado con la cámara AFA-21 y estaba equipado con el piloto automático AP-63. Debido a la necesidad de desplegar equipos de reconocimiento, la longitud del fuselaje aumentó a 8,96 M. Para poder ser transportado por carretera, las alas eran fácilmente desmontables. Un explorador, a diferencia de un objetivo, tenía que ser usado muchas veces. Aparato de aterrizaje previsto para un paracaídas. Aunque, en la práctica, los oficiales de inteligencia, por regla general, aterrizaron como "objetivos" a lo largo de un avión, en una góndola de una central eléctrica.
Después de esto, el TRD no estuvo sujeto a recuperación, y otros elementos del vehículo de reconocimiento no tripulado sufrieron. Sin embargo, se requirió un aterrizaje relativamente preciso de un avión de reconocimiento no tripulado para guardar la película capturada y otra información recibida. De acuerdo con los resultados de las pruebas conjuntas que finalizaron en el verano de 1963, se descubrió que La 17Р podía realizar un reconocimiento de vuelo a una distancia de 7 km cuando volaba a una altitud de 200 km, y cuando volaba a altitudes bajas por debajo de 1000 km. La velocidad de vuelo fue 90-680 km / h.
El uso de la aeronave objetivo fue un evento planificado que se llevó a cabo a la hora acordada. El complejo de reconocimiento no tripulado táctico TBR-1 con La-17Р se convertiría en una unidad bastante móvil, con un tiempo de despliegue aceptable en la posición de lanzamiento. La escuadra de inicio del complejo incluía el KRAZ-214 o KRAZ-255, los sistemas de lanzamiento, los vehículos TUTR-1, el tipo de la embarcación. los controles del equipo objetivo y el lanzamiento del motor principal, así como las estaciones de radar y comando de radio MRV-1M y Kama, para controlar el avión de reconocimiento no tripulado y rastrear su vuelo.
Un escuadrón separado de aeronaves de reconocimiento no tripuladas también incluía una unidad técnico operativa equipada con vehículos especiales para revisar equipos, grúas de camiones y otros equipos, un destacamento de manejo que proporciona el aterrizaje de una aeronave de reconocimiento no tripulados en un área determinada y la recuperación de materiales de reconocimiento de su lado, otras unidades y equipos.
El complejo TBR-1 ha sido mejorado. El avión de reconocimiento actualizado La-17PM, en sus soluciones técnicas, en muchos aspectos correspondió al objetivo La-17MM. Más tarde desarrollada y autopropulsada instalación SATR-1 en el chasis ZIL-134. En lugar del equipo fotográfico tomado inicialmente, los aviones de reconocimiento no tripulados podrían llevar cámaras AFA-40, AFBA-40, AFA-20. FFT-21, ASChFA-5M, cámara Chibis, equipo de reconocimiento de radiación Sigma. La experiencia operativa demostró que, a pesar de equipar el reconocimiento no tripulado con un trazador, no siempre era posible determinar correctamente la altura de su vuelo y cambiar el ángulo de ataque antes de tocar el suelo. Los exploradores instalaron cargamentos con cables expulsados de la sección de la cola del casco a baja altitud y caídos, como un hídrico bajo un globo. Cuando el cargamento tocó la superficie del suelo, frenó y colocó un cheque en el cuerpo del reconocimiento no tripulado con un cable. Como resultado, el piloto automático movió el automóvil al ángulo de ataque deseado, reduciendo la velocidad de descenso.
A partir de la segunda mitad de los años sesenta, la mejora de ambas variantes del La-17 se llevó a cabo en Kazán por parte de Sport Aviation Bureau, que más tarde pasó a llamarse Falcon OKB. A comienzos del 1980-x, las modernas BP-17 y BP-17 comenzaron a llegar a la obsoleta La-2Р y La-3РМ.
Especificaciones (La-17M)
Características generales
Tripulación = no
Motor = 1 × Tumansky RD-9 BK, 19,2 kN
Potencia = 4300 lbf de empuje
Velocidad máxima = 900 km hora
Autonomía = 1 hora
Techo de servicio = 17.000 m
Longitud = 8,44 m
Envergadura = 7,50 m
Peso bruto = 3.065 kg








































